Steven Brown Mail Linkedin Github
Project Overview
The goal of the project was to design and develope, as part of a team, an autonomously closing claw able to pick up
a range of objects from golf balls to cans of soup and hold for a minimum of 10 seconds, and then release the object.
We placed 2nd in the variety objects round and 1st in the bulk object round out of 16 teams.
The ultrasonic sensor was connected to an Arduino board which was programmed in C to detect objects and trigger
activation through a breadboard.
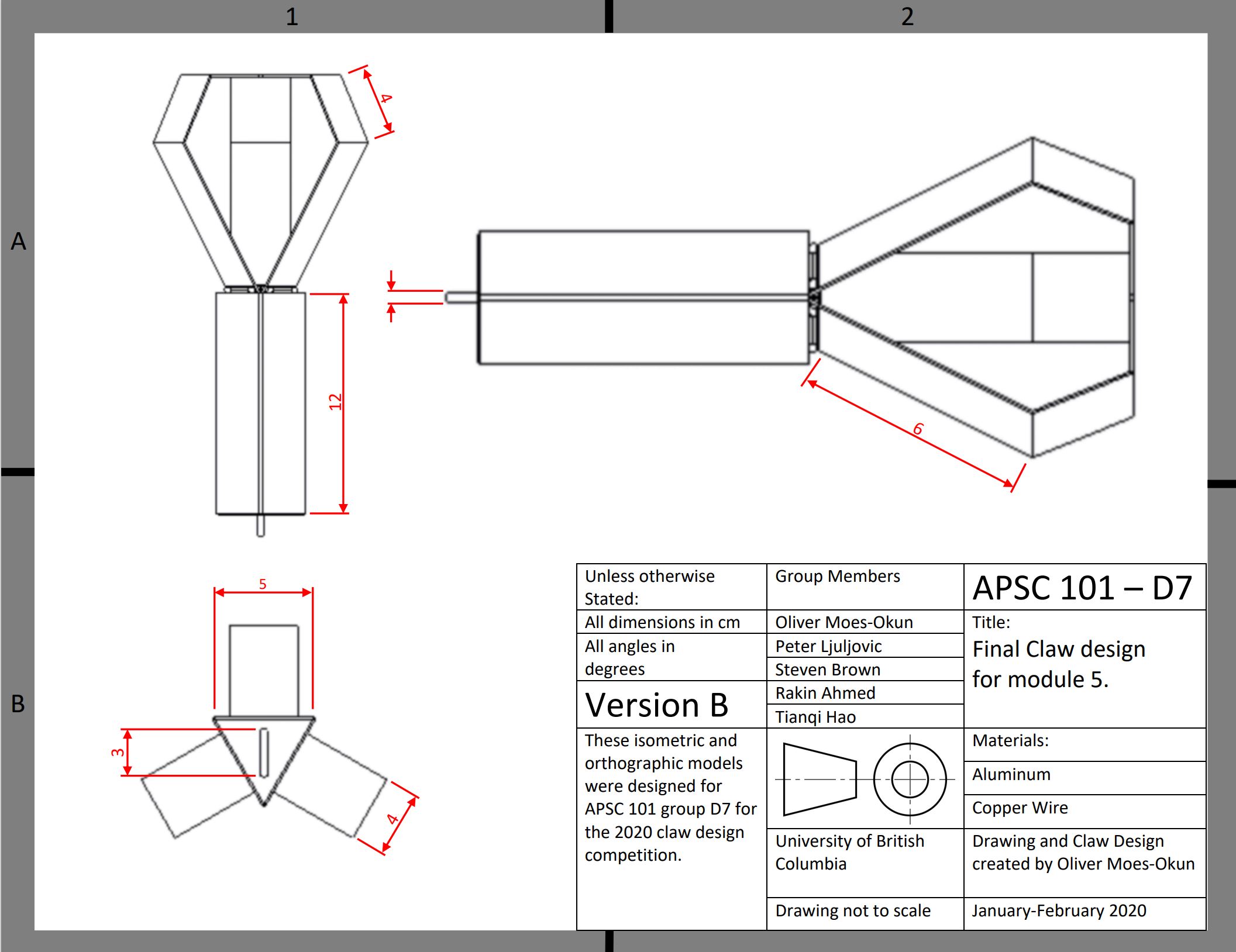
A tri-pronged claw design was chosen in order to minimize material used and maximize the
number of objects that could fit in the claw.
Conceptual prototypes were first constructed using drawings (c sketch), followed by a physical prototype using
cardboard, and then the final functioning product using hand tools to cut sheet aluminum.
Orthographic Drawing